| ROBOZEAL | WIRED ROBOT MANUAL |
DESIGNING WIRED ROBOT
1. Introduction-
This is a primer project which covers following concepts-
- Power Supply.
- DPDT switch operation.
- D.C. Motor.
- Basic motion of Robot
2. Tools & Components –
There are following tools are required for this project-
- Soldering iron
- Hack saw/ blade
- Screw drivers
- Multimeter
- Pliers
- Wire stripper
- Spanner
- Hammer
There are following components are required for this project-
- Battery (6 volt , 4.5 Ah) - 1 nos.
- DPDT Switch- 2nos.
- Ribbon wire strip- 3 meters+
- D.C. motor- 2nos
- Chassis(having holes for motor) - 1
- Remote box 1
- Metal strip 12
- Wheels 2 nos.
- Castor wheel 1nos
- Soldering wire - as required
3. Procedure-
- PAPER PLANNING:
Before you start making your robot you need a paper plan. Measure length of the motor (excluding shaft), diameter of shaft of the motor, inner hole diameter of the motor. Draw a rough sketch of the base you need to cut keeping in mind the placement of motors and wheels.
Holes to fit caster wheel
Holes for wiring
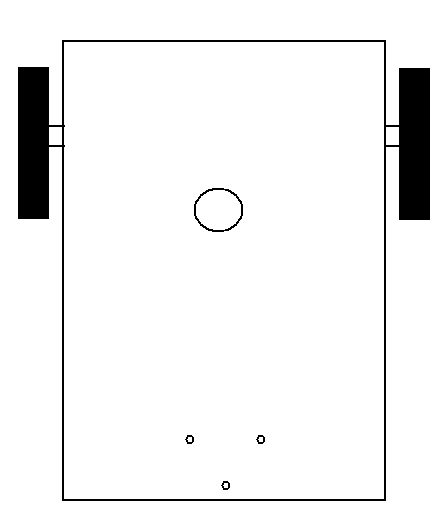
TOP VIEW
Caster wheel
Holes to fit caster motor
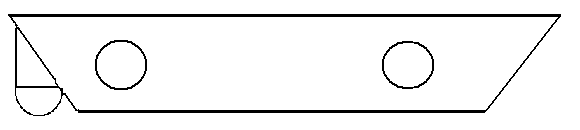
SIDE VIEW
- Mechanical Assembly –
Fit the caster wheel at position show in above diagram with 1.5-2 inches (approx.) screw. Fit the dc motor into the holes of chassis and couple the wheel by using screw or rubber tube.

Bolt is to fit outside of chassis
Coupling motors and wheels
- Remote Designing-
Before designing remote we have to learn basic movement of robot which is shown in following table.
| Movements | Motor1 (left) | Motor2(right) |
| For moving forward | Clockwise | Clockwise |
| For moving backward | Anticlockwise | Anticlockwise |
| For turning left | Off | Clockwise |
| For turning right | Clockwise | Off |
To make anti-clockwise motion of motor, the polarity of supply must be inverted of polarity of supply in clockwise motion. For "Polarity Reversal" DPDT switches are generally used. This can be done by using following circuit.
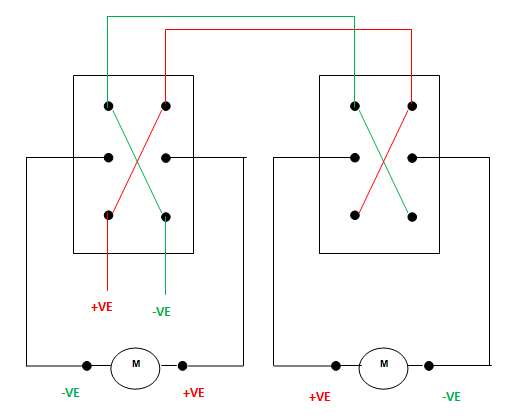
DPDT Switch Connections for REMOTE
The wire should solder on metal strip not on switches directly (as shown in fig 3). This precaution helps us if there is wrong connection occurs in circuit. So we can change the circuit by changing metal strip position (fig 4). The procedure is shown in figure below-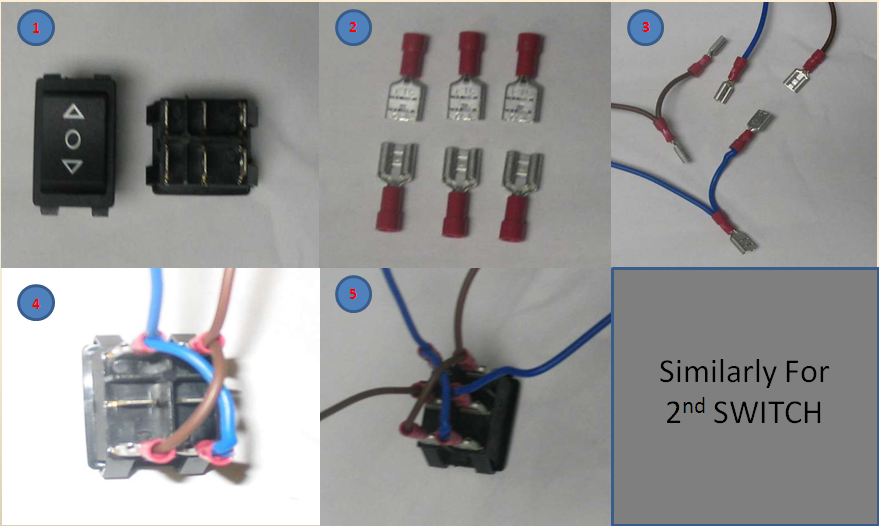
DPDT Connections
4. Motor connections-There are 4 output wires from remote which is to solder on motor by ribbon wire strip. Switch1's output should connect motor1 and switch 2's on motor2. This means switch1 controls motor 1 and switch 2 controls motor2. Before connecting motor by soldering, the polarity of motor should be check buy giving direct supplyfrom battery.
5. Power Supply-
The rechargeable battery of rating 9 Volt and 4.5 ampere rating should connected with remote switch (as shown in fig).
4. Speed calculation of robot-
Speed of robot can be calculate by following formula-
Velocity = circumference * rpm
Velocity = diameter * pi * rpm OR Velocity = 2 * radius * pi * rpm
The RPM of motor will perfect match with its specification if only is power rating of motor is provide by power supply.






.bmp)
41 comments:
aditya,
i want to design a wired robot for my coll tech symposium....could u help me in this regard...and also i want to design a earth grabber which should lift sort of gravel and deposit over a short distance
regards,ya
sur
Sure surya, keep Querying, I will try to answer at my best.
Providing a blueprint for binational cooperation to address the linked problems of energy security, sustainable development and climate change!
Hi Mani,
For controlling the speed of the motor, you must design some closed loop system,PWM is the most common technique used for speed control. Go through this article.
http://robozeal.blogspot.com/2009/03/wheels.html
Cheers...
Hi Mani,
As far as i think if you need to apply the same PWM signal to both the motors at the same time, there should not be any problem in connecting two motors in parallel and controlling the speed of both simultaneously, you can try and go forward with your idea.
Regarding micro-controller burner kit, what family you are referring two. I already have a burner design article posted on the blog for AVR 40 pin micro-controllers.
Here is the link: http://robozeal.blogspot.com/2009/06/parallel-port-programmer-for-atmega.html
hii... aditya i 'm new to microcontroller can you tell me about microcontroller,its family etc.and one more request that i thiking of making wireless remote control car can you help me regarding its circuit
i need a circuit of rc car and also tell me which microcontroller used in rc car
If you are a beginner, start learning about 8051 family of microcontrollers, you can find a lot of content on these.
Regarding RC car, shortly i will be posting a tutorial which will include all the circuit design and step wise process to build a wireless car. There is no need of micro-controller in designing a remote control car.
sir I am making a robo car just the same u hv shown but the only difference is that I m using 4 motors connected with 4 wheels so I m not using any castor wheels.
can u help me with its circuit diagram of how to connect it with a dpdt switch????
I don't see any use of 4 motors with 4 wheels. Still if you are using, then make the connections for the same side motors common. Like motors for left wheels will be connected together and same is for right motors. Hope you got what i am trying to explain. Revert back if any confusion.
sir ,
will this design of yours with two motors and a Castor wheel be able to go through different terrains like sand and stones and will this be able to cross small bumps and slopes.
I am designing this for an all terrain competition. so will this be an effective option.
You can go ahead with 4wheels also, but there is no need of front motors, let the front wheels be free that will do the trick as well.
In that case also the circuit diagram is same without any change.
Strength of the car will depend on the types of wheels you are using and the power of motor, use good quality wheels and decent RPM motors (300 to 500 RPM).
sir ,
will this design of yours with two motors and a Castor wheel be able to go through different terrains like sand and stones and will this be able to cross small bumps and slopes.
I am designing this for an all terrain competition. so will this be an effective option.
bhoomi here
plz also explain how i can control four wheels using two motors?? bcz there are only two motors in the circuit and i want to make 4 wheel robot, plz reply fast,plz plz plz
hi,
first of all your blog is very useful, thank you for creating such wonderful blog.
i have one doubt, cant we make a wired bot to turn 90 degrees on spot ( one wheel goes anti clckwise and othe clockwise simultaneously)
Hi Sundaram,
Thanks for appreciating the blog.
Definitely you can, The switch diagram posted above allows you for that, Press one switch backward and other forward, you will get 90 degrees on spot rotation.
Get all the components in India here
www.onlineTPS.com
aditya
i want to make a robot and m using 6 wheels and 6 motors can you tell me how to do connections on dpdt switch.??????
Hey Ashish,
Can you throw some light on what is the purpose of so many wheels, are you looking for a tank kind of assembly?
Hi rahul!!
i'm making a robot of 6 wheel and 4 motors.middle tyres will be free.
So,what would be its circuit designing ???
Hi Vibhore,
It will be same. If the middle wheels are free, they hardly have any role for the circuit.
Cheers..
Aditya
Clips
http://www.onlinetps.com/shop/index.php?main_page=product_info&cPath=68&products_id=871
respected aditya sir,
thank you very much for creating such a helping blog.....
I knows very little about robotics there is a competition in my college and lot of people said me that you don't know anything, u can't participate...
I have to design a wired robot which can be controlled by one remote only, it has to pass from various obstacles like pit etc. and then it will reach an arena where it has to battle with an enemy robot..either to push it out of the arena or inside a pit..
Sir i even don't know how to start with..Sir I want to win the competition...please help me sir..it will be very kind of you....If you specify a way I may send you the detailed specifications of the competition...please sir help me as soon as possible..it is on 15 feb....
please help in building some lifting mechanism to lift blocks manually by this robo,block dimension is varying from 50 to 70 mm.
dear aditya sir,
i want to make a moving pick n place robot(using 8051 assembly)..the directional movement will be controlled by remote..can u help in designing the remote using dpdt switches and the gripper..i dont have even the slightest idea about how to make the gripper?
-upasana
where we connect two motors for two motor and four wheel car. Are we connect two motor to first left and right side wheel ?
hi sir,
gaurav here
sir i want to know about wireless robot designing
Wheels with crown shaped treads enhance the ability of a swivel caster to turn or change direction. Crown shaped treads roll easier on carpet than rubber wheels with "flat" shaped treads due to the narrow footprint of the tire.
Sir, I want to know each & every step to make wired control racing robot.
Sir, please upload complete process to make a racing robot using joystick controller.
Hi Aditya how can u assest me in selecting motors plz reply asap
how to use a rf module (ws-rx-02)& (ws-tx-01) to control a motor wire less
sir could you please provide information to convert the wired remote control robot into a wireless remote control...
how can i build my own wired remote control car. and how can i create a dc motor myself. I wanted to create a transmitter and a recevar myself... pls help me trhough dis things. thanks. waiting for reply.
i want to javascript:;make a wired robot hitting a golf ball in a particular hole... and also hitting a ball upto a fixed height, at my coll feast .
wat da mechanisn should i use??? plz help me
thanks for ur help.
i searched international sites for this circuit for hours,finally found it here.
its really true that desi way is the best.
can u help me to design a spst supply system for a wired robo car.
Hello sir ,
I'm Sachin
After reading your blog, I got interested in making robots.
I want to learn how to make this kind of things..how should I start learning it..i'm a first year mechanical engineering student.please guide me..
sir how can i make wireless robo
Aditya Sharma You are doing a Great job, this is something that i can say with assured reasons. Keep up with such good work.
hey aditya....
this is tirth...if i want to control my robot in such a way that...one of the two switches will control right/left motion and another forward/backward....take a note i'm preparing a four motor/four wheeled robo..
I really liked your blog. You have shared such an informative post. Web Development Company in India
Post a Comment